Bài đăng thảo luận về một mạch điều khiển từ xa máy bay trực thăng RC đơn giản sử dụng mô-đun RF 433kHz mà không cần bất kỳ bộ vi điều khiển hoặc triển khai cần điều khiển phức tạp nào.
Ý tưởng do ông Jitendra yêu cầu.
Mục tiêu và yêu cầu của mạch
- Tôi đang chế tạo một chiếc trực thăng RC quy mô lớn. Trong đó tôi đang sử dụng 4 động cơ. Đối với động cơ 12v chính thứ nhất: cơ chế là tôi muốn tốc độ của nó được điều khiển bằng một phím điều khiển trên điều khiển từ xa, từ 0 đến tốc độ tối đa.
- Đối với động cơ 3v thứ 2: cơ chế của nó chỉ để quay thuận và quay ngược với phím riêng trên điều khiển từ xa cho từng động cơ vì nó sẽ vận hành các tấm xoay của rôto.
- Đối với động cơ đuôi 9v thứ 3: nó phải được đặt ở tốc độ cân bằng bằng cách sử dụng bộ điều chỉnh trên bảng nhận của máy bay trực thăng để tôi có thể điều chỉnh tốc độ theo cách thủ công để ngăn máy cắt trực thăng .. quay cùng với các cánh quạt và có một phím trên điều khiển từ xa sẽ làm chậm lại và tăng tốc động cơ từ trạng thái cân bằng.
- Nguồn đầu vào trong bo mạch nhận sẽ là 12v và dòng điện 8-10 ampe. Nó phải có phạm vi 500-800 mét. Bạn có thể vui lòng thiết kế một bảng mạch RC như vậy cùng với điều khiển từ xa.
- Tôi đang tìm kiếm bảng mạch như vậy kể từ hai năm qua.
- Dự án của tôi đã bị dừng do vắng mặt. Xin hãy giúp tôi. Để thuận tiện cho bạn, bạn có thể thiết kế hai bảng mạch rc riêng lẻ, một cho động cơ chính và động cơ đuôi và một bảng khác cho hai động cơ quay thuận và nghịch.
- Nhưng dòng điện đầu vào và sự khác biệt tiềm năng trong cả hai mạch phải giống nhau, với cùng phạm vi là 500-800 mét với điều khiển từ xa hoặc điều khiển từ xa của nó. Cũng vui lòng đề cập đến tên của các thành phần được yêu cầu đánh số.
Thiết kế
Các mô-đun mạch yêu cầu được yêu cầu để xây dựng máy bay trực thăng RC được đề xuất là:
1) Bộ điều khiển tốc độ thay đổi 12V PWM
2) Một mạch điều khiển thuận nghịch động cơ 3V.
3) một bộ điều chỉnh động cơ 9V với một mạch điều khiển tốc độ thay đổi.
Tất cả các thông số kỹ thuật trên cần được điều khiển thông qua dải tần dài 433MHz Mô-đun điều khiển từ xa RF .
Có thể mua mô-đun từ xa RF 433MHz mong muốn từ bất kỳ cửa hàng trực tuyến nào hoặc từ đại lý điện tử gần nhất của bạn. Phạm vi của điều khiển từ xa phải theo thông số kỹ thuật yêu cầu của phạm vi trực thăng RC, ở đây nó được cho là trong vòng 1 km.
Đối với mạch điều khiển từ xa máy bay trực thăng RC đã thảo luận, mô-đun điều khiển từ xa 6 kênh RF sẽ được yêu cầu, chính xác tương tự như mô-đun đã được sử dụng cho trước đó của chúng tôi mạch điều khiển từ xa máy bay không người lái đơn giản nhất .
Hình ảnh tương tự có thể được chứng kiến dưới đây:

Bảng màu xanh lá cây bên trái là mô-đun thu từ xa có sáu rơ le điều khiển và các đơn vị này cần được lắp đặt bên trong máy bay trực thăng RC để thực hiện các hoạt động điều khiển cần thiết.
Bộ phận bên phải là thiết bị cầm tay của máy phát được người dùng cầm và các nút có liên quan được nhấn để chỉ huy bảng chuyển tiếp với thông tin điều khiển chuyển động tương ứng.
Bây giờ chúng ta hãy xem cách sáu rơ le cần được cấu hình với các mạch PWM khác nhau và được cài đặt bên trong bộ cắt RC, từ các chi tiết sau:
Hãy nhớ các tiếp điểm rơle hiển thị trong bảng máy thu đều trống theo mặc định, có nghĩa là các tiếp điểm N / C và N / O của chúng không có dây và phải có dây như minh họa trong sơ đồ sau.
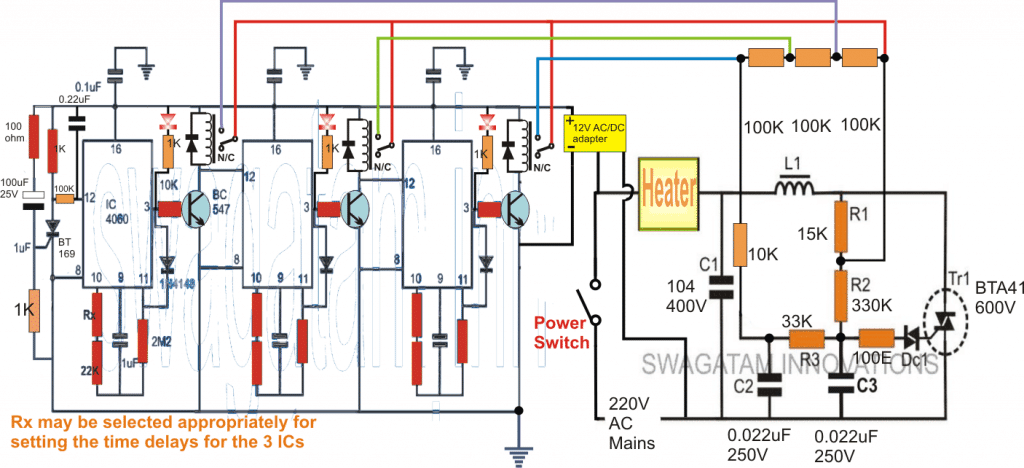
Theo yêu cầu, tốc độ động cơ 9V và động cơ 12V cần được điều khiển thông qua thao tác nhấn tiếp theo của thiết bị cầm tay từ xa. Các mạch để thực hiện chức năng này được hiển thị bên dưới:
Sơ đồ trình điều khiển động cơ


Hoạt động mạch
Như có thể thấy trong sơ đồ, một số IC 555 mạch PWM được sử dụng cho mục đích. Bốn trong số sáu rơ le được gắn ở đây với các tiếp điểm có liên quan của chúng được nối dây qua các kết nối được hiển thị.
Trong thiết kế IC 555 được thiết kế như một mạch ổn định cơ bản, được gán để dao động với một số tần số xác định tùy thuộc vào giá trị thành phần R1, R2 và C của nó .
Một bộ theo điện áp ở dạng IC 741 được cấu hình với chân điều khiển số 5 của IC 555 để thay đổi nội dung PWM ở chân số 3 của IC 555 phù hợp với các hoạt động rơle được chỉ định.
Điện áp tại chân số 3 của IC 741 được nối tiếp hoặc chuyển ở chân số 6 và sau đó đến chân số 5 của IC 555. Tùy thuộc vào mức sạc tụ điện của chân số 3, điện áp thay đổi này có thể nằm ở bất kỳ đâu giữa giới hạn điện áp nguồn và số không.
Mức sạc trên tụ điện có thể thay đổi hoặc thay đổi bằng cách chỉ cần sạc nó hoặc phóng điện qua kích hoạt tiếp điểm rơle có liên quan. Để sạc, tiếp điểm rơle trên được đóng hoặc kích hoạt cho phép điện áp tăng ở chân số 5 của IC 555 trong khi kích hoạt tiếp điểm rơle phía dưới phóng điện tụ điện gây ra điện áp thấp hơn tương ứng xuất hiện ở chân số 5 của IC 555.
Các hành động trên chuyển kết quả chân số 3 thành PWM khác nhau tương ứng, do đó làm cho động cơ chạy nhanh hơn hoặc chậm hơn.
Fro động cơ 9V có thể nhìn thấy một loạt điốt được gắn ở bộ phát của bóng bán dẫn điều khiển, điều này đảm bảo điện áp giảm theo yêu cầu và giúp chuyển đổi 12V thành nguồn cung cấp được điều chỉnh gần đúng 10V theo thông số kỹ thuật của động cơ.
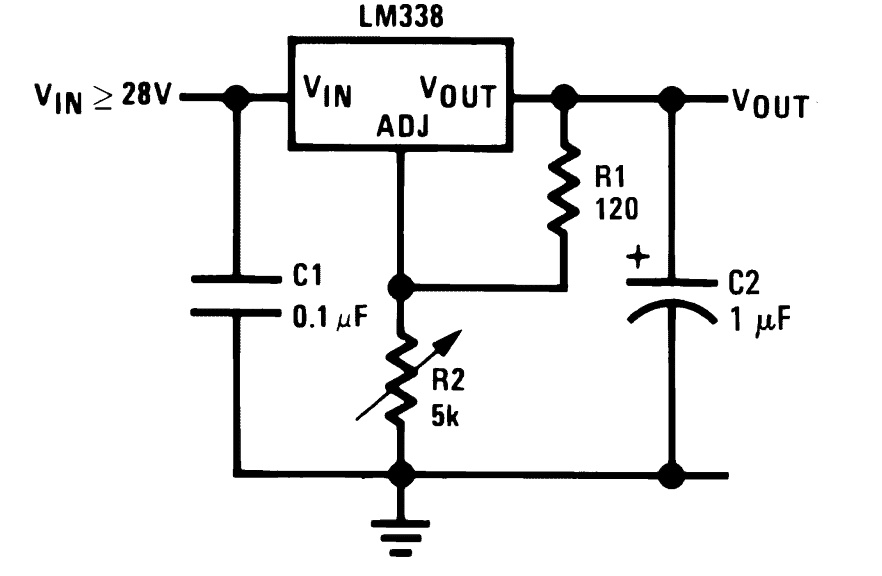
Hoạt động chuyển tiếp ngược động cơ 3V
Yêu cầu thứ ba và cuối cùng trong yêu cầu là cho điều khiển lùi / tiến của động cơ 3V sử dụng nút bấm của thiết bị phát RF.
Hai rơ le còn lại hiện có thể được sử dụng cho việc thực thi cụ thể này và được thực hiện như được minh họa trong sơ đồ sau:

Ở đây chúng tôi cũng sử dụng IC 555 đa năng có dây như một mạch tạo PWM chính xác. PWM được thiết lập thích hợp thông qua cài đặt trước 5K trước khi hoàn thiện cài đặt sao cho tốc độ của động cơ được điều chỉnh hoàn hảo về trạng thái cân bằng cần thiết của trực thăng.
Các rơle có thể được nhìn thấy đơn giản được nối dây để thực hiện chuyển động ngược lại và chuyển tiếp hoặc chuyển động theo chiều kim đồng hồ hoặc ngược chiều kim đồng hồ cho động cơ để đáp ứng việc bật tắt của tiếp điểm rơle được ghép nối, chúng cùng nhau tạo thành rơle DPDT.
Để tránh đoản mạch, tốt nhất nên sửa đổi mô-đun bộ thu cho hai rơ le này sao cho việc nhấn một trong hai nút khiến cả hai rơ le kích hoạt cùng nhau thay vì tan tùy thuộc vào hai công tắc được nhấn đồng bộ để kích hoạt.
Việc chuyển đổi này có thể dự kiến sẽ lật chuyển động quay theo hướng ngược lại ngay lập tức cho phép người dùng thực hiện các thay đổi hướng cần thiết trong máy trực thăng RC.
Điều này kết thúc mạch và hướng dẫn đấu dây chuyển tiếp cho mạch điều khiển từ xa máy bay trực thăng RC được đề xuất, nếu có thêm nghi ngờ, vui lòng bày tỏ chúng thông qua nhận xét của bạn.
Một cặp: Mạch công tắc BẬT / TẮT tự động thông minh siêu âm Tiếp theo: Mạch khuếch đại công suất MOSFET Class A đơn