LIDAR hoặc quét laser 3D được phát triển vào đầu những năm 1960 để phát hiện tàu ngầm từ máy bay và các mô hình ban đầu đã được sử dụng thành công vào đầu những năm 1970. Ngày nay, việc nghiên cứu môi trường thật khó tưởng tượng nếu không sử dụng các kỹ thuật viễn thám như Phát hiện và đo ánh sáng (LIDAR) và Phát hiện và đo sóng vô tuyến (RADAR) . Độ phân giải không gian cao và tiến bộ của các phép đo, khả năng quan sát bầu khí quyển ở các điều kiện xung quanh và tiềm năng bao phủ phạm vi độ cao từ mặt đất đến độ cao hơn 100 km tạo nên sức hấp dẫn của các thiết bị LIDAR.
Sự đa dạng của các quá trình tương tác của bức xạ phát ra với các phần tử khí quyển có thể được sử dụng trong LIDAR để cho phép xác định các biến môi trường cơ bản về trạng thái, tức là nhiệt độ, áp suất, độ ẩm và gió, cũng như khảo sát địa lý, sông độ cao của lòng biển, nghiên cứu các mỏ, mật độ rừng và đồi, nghiên cứu dưới đáy biển (Bathymetry).
LIDAR hoạt động như thế nào?
Nguyên lý hoạt động của hệ thống Phát hiện và Rạng sáng thực sự khá đơn giản. Một cảm biến LIDAR gắn trên máy bay hoặc trực thăng. Nó tạo ra tàu xung Laser, được gửi đến bề mặt / mục tiêu để đo thời gian và nó cần để quay trở lại nguồn của nó. Tính toán thực tế để đo khoảng cách mà một photon ánh sáng trở lại đã đi đến và đi từ một vật thể được tính bằng
Khoảng cách = (Tốc độ ánh sáng x Thời gian bay) / 2
Khoảng cách chính xác sau đó được tính đến các điểm trên mặt đất và độ cao có thể được xác định cùng với các tòa nhà trên mặt đất, đường xá và thảm thực vật có thể được ghi lại. Những độ cao này được kết hợp với chụp ảnh trên không kỹ thuật số để tạo ra mô hình độ cao kỹ thuật số của trái đất.

Hệ thống phát hiện và đo sáng
Thiết bị laser bắn ra các xung ánh sáng laser nhanh trên một bề mặt, một số có tốc độ lên đến 150.000 xung mỗi giây. Một cảm biến trên thiết bị đo lượng thời gian cần để mỗi xung phản xạ trở lại. Ánh sáng di chuyển với tốc độ không đổi và đã biết để thiết bị LIDAR có thể tính toán khoảng cách giữa chính nó và mục tiêu với độ chính xác cao. Bằng cách lặp lại điều này trong tiến trình nhanh chóng, thiết bị xây dựng một ‘bản đồ’ phức tạp của bề mặt mà nó đang đo.
Với Phát hiện và đo ánh sáng trên không , các dữ liệu khác phải được thu thập để đảm bảo tính chính xác. Khi cảm biến đang di chuyển độ cao, vị trí và hướng của thiết bị phải được bao gồm để xác định vị trí của xung laser tại thời điểm gửi đi và thời điểm quay trở lại. Thông tin bổ sung này rất quan trọng đối với tính toàn vẹn của dữ liệu. Với Phát hiện và đo sáng trên mặt đất một vị trí GPS duy nhất có thể được thêm vào tại mỗi vị trí nơi thiết bị được thiết lập.
Các loại hệ thống LIDAR
Dựa trên nền tảng
- LIDAR trên mặt đất
- LIDAR trên không
- LIDAR trên không gian

Hệ thống LiDAR dựa trên nền tảng
Bade trên quá trình vật lý
- Máy đo khoảng cách LIDAR
- DIAL LIDAR
- LIDAR Doppler
Bade on Scattering Process
- Của tôi
- Rayleigh
- Raman
- Huỳnh quang
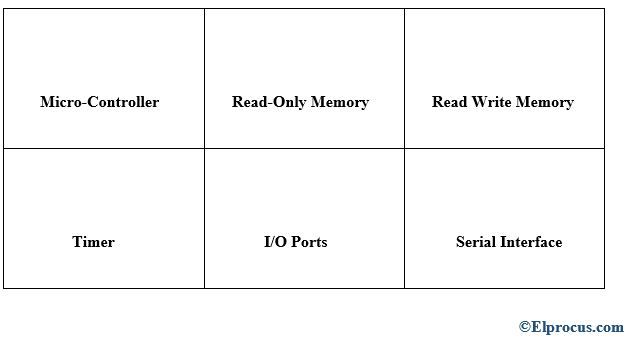
Các thành phần chính của Hệ thống LIDAR
Hầu hết các hệ thống phát hiện và định vị ánh sáng sử dụng bốn thành phần chính

Các thành phần của hệ thống phát hiện và đo sáng
Laser
Laser được phân loại theo bước sóng của chúng. Hệ thống phát hiện và đo ánh sáng trong không khí sử dụng laser Nd: YAG 1064nm được bơm đi-ốt trong khi hệ thống Bathymetric sử dụng laser Nd: YAG 532nm được bơm đi-ốt kép xâm nhập vào nước với độ suy giảm ít hơn so với hệ thống trong không khí (1064nm). Có thể đạt được độ phân giải tốt hơn với các xung ngắn hơn với điều kiện bộ dò máy thu và thiết bị điện tử có đủ băng thông để quản lý luồng dữ liệu tăng lên.
Máy quét và Quang học
Tốc độ hình ảnh có thể được phát triển bị ảnh hưởng bởi tốc độ mà nó có thể được quét vào hệ thống. Nhiều phương pháp quét có sẵn cho các độ phân giải khác nhau như góc phương vị và độ cao, máy quét trục kép, gương mặt phẳng dao động kép và gương đa giác. Loại quang xác định phạm vi và độ phân giải có thể được phát hiện bởi một hệ thống.
Bộ tách sóng và điện tử máy thu
Bộ tách sóng quang là một thiết bị đọc và ghi lại tín hiệu bị tán xạ ngược vào hệ thống. Có hai loại công nghệ chính của bộ tách sóng quang, bộ dò trạng thái rắn, chẳng hạn như điốt quang tuyết lở silic và bộ nhân quang.
Hệ thống định vị và dẫn đường / GPS
Khi cảm biến phát hiện và đo sáng được gắn trên vệ tinh máy bay hoặc ô tô, cần phải xác định vị trí tuyệt đối và hướng của cảm biến để duy trì dữ liệu có thể sử dụng được. Hệ thống định vị toàn cầu (GPS) cung cấp thông tin địa lý chính xác liên quan đến vị trí của cảm biến và Đơn vị đo lường quán tính (IMU) ghi lại hướng chính xác của cảm biến tại vị trí đó. Hai thiết bị này cung cấp phương pháp chuyển dữ liệu cảm biến thành điểm tĩnh để sử dụng trong nhiều hệ thống khác nhau.

Hệ thống định vị và dẫn đường / GPS
Xử lý dữ liệu LIDAR
Cơ chế phát hiện ánh sáng và đo khoảng cách chỉ thu thập dữ liệu độ cao và cùng với dữ liệu của Thiết bị đo quán tính được đặt cùng với máy bay và thiết bị GPS. Với sự trợ giúp của các hệ thống này, cảm biến Phát hiện và đo khoảng cách ánh sáng thu thập các điểm dữ liệu, vị trí của dữ liệu được ghi lại cùng với cảm biến GPS. Dữ liệu được yêu cầu để xử lý thời gian quay trở lại cho mỗi xung phân tán trở lại cảm biến và tính toán các khoảng cách thay đổi từ cảm biến hoặc những thay đổi trên bề mặt đất phủ. Sau khi khảo sát, dữ liệu được tải xuống và xử lý bằng phần mềm máy tính được thiết kế đặc biệt (Phần mềm xử lý dữ liệu đám mây điểm LIDAR). Kết quả cuối cùng là kinh độ (X), vĩ độ (Y) và độ cao (Z) chính xác, được đăng ký địa lý cho mọi điểm dữ liệu. Dữ liệu bản đồ LIDAR bao gồm các phép đo độ cao của bề mặt và thu được thông qua các cuộc khảo sát địa hình trên không. Định dạng tệp được sử dụng để thu thập và lưu trữ dữ liệu LIDAR là một tệp văn bản đơn giản. Bằng cách sử dụng dữ liệu điểm độ cao có thể được sử dụng để tạo bản đồ địa hình chi tiết. Với những điểm dữ liệu này, chúng cũng cho phép tạo ra một mô hình độ cao kỹ thuật số của bề mặt đất.
Các ứng dụng của Hệ thống LIDAR
Hải dương học
LIDAR được sử dụng để tính toán huỳnh quang và sinh khối của thực vật phù du trong bề mặt đại dương. Nó cũng được sử dụng để đo độ sâu của đại dương (độ sâu).

LiDAR trong Hải dương học
DEM (Mô hình độ cao kỹ thuật số)
Nó có tọa độ x, y, z. Giá trị độ cao có thể được sử dụng ở mọi nơi, trên đường, tòa nhà, cầu và các nơi khác. Nó giúp dễ dàng nắm bắt chiều cao, chiều dài và chiều rộng bề mặt.
Vật lý khí quyển
LIDAR được sử dụng để đo mật độ của các đám mây và nồng độ của oxy, Co2, nitơ, lưu huỳnh và các hạt khí khác trong tầng giữa và trên của bầu khí quyển.
Quân đội
LIDAR luôn được quân dân sử dụng để hiểu về biên giới xung quanh đất liền. Nó tạo ra một bản đồ có độ phân giải cao cho mục đích quân sự.
Khí tượng học
LIDAR đã được sử dụng để nghiên cứu đám mây và hành vi của nó. LIDAR sử dụng bước sóng của nó để tấn công các hạt nhỏ trong đám mây để hiểu mật độ đám mây.
Khảo sát sông
Greenlight (532 nm) Lasar của LIDAR được sử dụng để đo thông tin dưới nước được yêu cầu để hiểu độ sâu, chiều rộng của sông, cường độ dòng chảy và hơn thế nữa. Đối với kỹ thuật sông, dữ liệu mặt cắt ngang của nó được trích xuất từ dữ liệu Phát hiện và đo lường ánh sáng (DEM) để tạo ra một mô hình sông, sẽ tạo ra một bản đồ rìa lũ.

Khảo sát sông bằng LIDAR
Địa hình vi mô
Light Detection And Ranging là công nghệ rất chính xác và rõ ràng, sử dụng xung Laser để chiếu vào vật thể. Đo quang thông thường hoặc công nghệ khảo sát khác không thể cung cấp giá trị độ cao bề mặt của tán rừng. Nhưng LIDAR có thể xuyên qua vật thể và phát hiện giá trị bề mặt.
Bạn đã có thông tin cơ bản về LIDAR và các ứng dụng của nó chưa? Chúng tôi thừa nhận rằng thông tin được cung cấp ở trên làm rõ các khái niệm cơ bản về khái niệm cơ chế Phát hiện và Rạng sáng với các hình ảnh liên quan và các ứng dụng thời gian thực khác nhau. Hơn nữa, bất kỳ nghi ngờ nào liên quan đến khái niệm này hoặc để thực hiện bất kỳ dự án điện tử nào, vui lòng đưa ra đề xuất và nhận xét của bạn về bài viết này, bạn có thể viết trong phần bình luận bên dưới. Dưới đây là một câu hỏi cho bạn, Các loại phát hiện và đo ánh sáng khác nhau là gì?