
Ngày nay, robot đang trở thành một trong những công nghệ tiên tiến nhất trong lĩnh vực công nghệ. Các ứng dụng của người máy chủ yếu liên quan đến ô tô, y tế, xây dựng, quốc phòng và cũng được sử dụng như một robot chữa cháy để giúp đỡ người dân khỏi tai nạn hỏa hoạn. Nhưng việc điều khiển robot bằng điều khiển từ xa hoặc công tắc khá phức tạp. Vì vậy, một dự án mới được phát triển, đó là một robot điều khiển cử chỉ dựa trên gia tốc kế. Mục tiêu chính của dự án này là điều khiển chuyển động của robot bằng cử chỉ tay sử dụng gia tốc kế.

Robot điều khiển bằng cử chỉ dựa trên gia tốc kế
Robot điều khiển bằng cử chỉ dựa trên gia tốc kế
Dự án này bao gồm phần phát và phần thu. Các thành phần bắt buộc để xây dựng dự án này là Ht12e, Ht12d, L293D, AT89S52, 7805, tụ điện, tinh thể, đầu nối PBT, ăng ten đơn cực, điện trở, đèn LED, gia tốc kế và pin. Gia tốc kế là thiết bị cần thiết trong dự án này.
gia tốc kế hoặc thiết bị phát phụ thuộc vào cử chỉ tay. Thông qua thiết bị phát, một lệnh được nhận và nó được xử lý với sự trợ giúp của vi điều khiển At89S51. Điều này vi điều khiển cho ra hiệu cho robot di chuyển theo hướng ưu tiên. Nguyên lý hoạt động cơ bản của bộ rô bốt này gồm các tín hiệu dữ liệu của việc truyền các kết quả đọc của thiết bị đến bộ vi điều khiển được lắp trong rô bốt. Bộ vi điều khiển được lập trình trước chạy theo chương trình khiến robot hoạt động tương ứng.
Robot được điều khiển bằng cử chỉ sử dụng gia tốc kế là một loại robot có thể được vận hành bằng chuyển động của bàn tay bằng cách đặt một gia tốc kế lên nó. Dự án này được chia thành hai phần thiết bị phát và thiết bị thu. Trong đó thiết bị cử chỉ hoạt động như một thiết bị phát và một robot hoạt động như một thiết bị thu.
Các thành phần chính được sử dụng trong phần truyền bao gồm gia tốc kế, bộ so sánh, bộ mã hóa IC HT12E và Máy phát RF .
Gia tốc kế
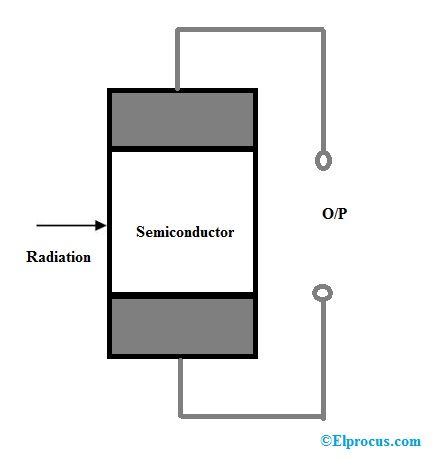
Gia tốc kế là một loại cảm biến và nó cung cấp một dữ liệu tương tự trong khi di chuyển theo hướng X, Y và Z. Các hướng này phụ thuộc vào loại cảm biến. Sơ đồ của gia tốc kế được hiển thị bên dưới. Cảm biến này bao gồm các hướng mũi tên, nếu chúng ta nghiêng cảm biến theo một hướng, thì dữ liệu tại chân cụ thể sẽ thay đổi dưới dạng tương tự. Gia tốc kế bao gồm sáu chân, trong đó chức năng của mỗi pin được thảo luận dưới đây.

Gia tốc kế
- Chân-1: Chân VDD được sử dụng để cấp nguồn + 5V cho chân này
- Chân-2: Chân GND được kết nối với mặt đất nhằm mục đích phân cực
- Pin-3: Pin X sẽ nhận dữ liệu theo hướng X
- Pin-4: Pin Y sẽ nhận dữ liệu theo hướng Y
- Pin-5: Pin Z sẽ nhận dữ liệu theo hướng Z
- Pin-6: Chân ST được sử dụng để điều chỉnh độ nhạy của gia tốc kế 1,5g hoặc 2g hoặc 3g hoặc 4g
Máy so sánh
Bộ so sánh được sử dụng để thay đổi điện áp tương tự thành điện áp kỹ thuật số và so sánh điện áp tương tự đó với điện áp tham chiếu và cung cấp chính xác điện áp thấp hoặc điện áp cao
Mã hoá
Bộ mã hóa này được sử dụng để mã hóa dữ liệu 4 bit và truyền bằng cách sử dụng mô-đun bộ phát RF.
Mô-đun máy phát RF
Mô-đun RF TX hoạt động với tần số 433MHz và mô-đun này dễ dàng có sẵn trên thị trường với giá thành rẻ
Các thành phần chính được sử dụng trong phần nhận bao gồm bộ thu, bộ giải mã, vi điều khiển và trình điều khiển động cơ.

Phần máy phát
Máy thu RF
Máy thu RF của dự án này sẽ nhận dữ liệu được chuyển bởi thiết bị truyền.
Người giải mã
Bộ giải mã được sử dụng để thay đổi dữ liệu nối tiếp thành dữ liệu song song được nhận từ mô-đun thu RF.
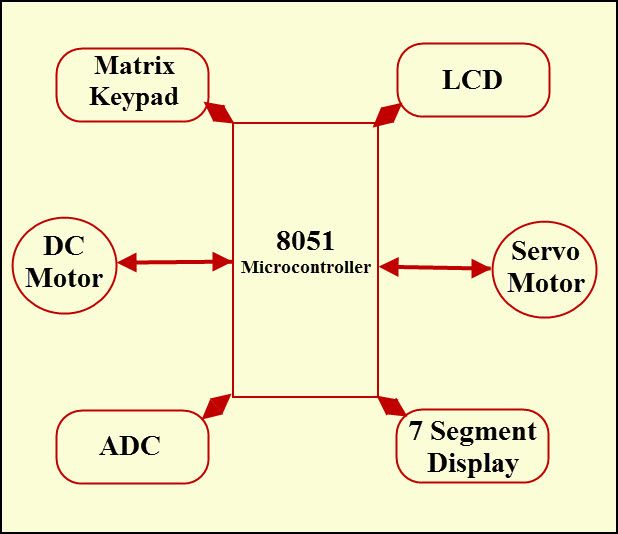
Vi điều khiển
Các vi điều khiển là phần thiết yếu nhất của robot. Một bộ vi điều khiển họ 8051 được sử dụng trong mạch để đưa ra công suất quyết định
Trình điều khiển động cơ
Bộ điều khiển động cơ là một thiết bị cung cấp chuyển động để thực hiện một nhiệm vụ giống như động cơ. Vì vậy, chúng tôi yêu cầu trình điều khiển động cơ chạy chúng thông qua bộ điều khiển. Giao diện giữa động cơ và vi điều khiển có thể được thực hiện bằng cách sử dụng IC điều khiển động cơ L293D trong mạch này.
Tại phần thu, một mô-đun thu RF nhận dữ liệu từ bộ phát. Dữ liệu nhận được có thể được giải mã bằng IC HT12D. Dữ liệu nhận được có thể được xử lý bởi vi điều khiển AT89S51 và trình điều khiển động cơ được sử dụng để điều khiển động cơ.

Phần người nhận
Robot điều khiển bằng cử chỉ hoạt động
Robot điều khiển bằng cử chỉ dựa trên gia tốc kế sẽ di chuyển theo chuyển động của bàn tay khi chúng ta đặt gia tốc kế lên tay bạn. Khi chúng ta nghiêng tay với gia tốc kế trước mặt rô bốt, thì rô bốt bắt đầu di chuyển về phía trước cho đến khi chuyển động tiếp theo. Khi chúng ta nghiêng tay theo hướng ngược lại, thì robot sẽ thay đổi hướng và trạng thái của nó. Sau đó, nó bắt đầu di chuyển theo hướng ngược lại cho đến khi tín hiệu tiếp theo được đưa ra. Khi chúng ta nghiêng tay sang bên trái thì robot sẽ di chuyển sang bên trái cho đến khi có tín hiệu tiếp theo. Tương tự, khi chúng ta nghiêng tay sang bên phải thì robot sẽ di chuyển sang bên phải.
Các ứng dụng
Các ứng dụng của gia tốc kế rô bốt điều khiển bằng cử chỉ dựa trên bao gồm
- Những robot này được sử dụng trong các ứng dụng quân sự để vận hành robot
- Những robot này được sử dụng trong các ứng dụng y tế với mục đích phẫu thuật
- Những người máy này được sử dụng trong lĩnh vực xây dựng
- Những robot này được sử dụng trong các ngành công nghiệp để điều khiển xe đẩy và thang máy.
Vì vậy, đây là tất cả về rô bốt điều khiển cử chỉ dựa trên Gia tốc kế, hoạt động và ứng dụng của nó. Chúng tôi hy vọng rằng bạn đã hiểu rõ hơn về khái niệm này. Hơn nữa, bất kỳ nghi ngờ nào liên quan đến khái niệm này hoặc dự án điện tử , vui lòng đưa ra phản hồi của bạn bằng cách bình luận trong phần bình luận bên dưới. Đây là một câu hỏi dành cho bạn, những ứng dụng của robot điều khiển cử chỉ dựa trên gia tốc kế là gì?
Tín ảnh:
- Robot điều khiển bằng cử chỉ dựa trên gia tốc kế ytimg
- Gia tốc kế static.flickr










{kind=link}
{kind=link}