
Giới thiệu:
- Giao thức : Một tập hợp các quy tắc và quy định được gọi là giao thức.
- Giao tiếp: Trao đổi thông tin từ hệ thống này sang hệ thống khác bằng một phương tiện được gọi là giao tiếp.
- Giao thức truyền thông: Một tập hợp các quy tắc và quy định cho phép hai thiết bị điện tử kết nối để trao đổi dữ liệu với nhau.
Các loại giao thức truyền thông điện tử:
Có hai loại giao thức truyền thông được phân loại dưới đây:
1. Giao thức liên hệ thống
2. Giao thức hệ thống nội bộ
1. Giao thức liên hệ thống: Giao thức liên hệ thống sử dụng để giao tiếp giữa hai thiết bị khác nhau. Giống như giao tiếp giữa máy tính với bộ vi điều khiển. Việc liên lạc được thực hiện thông qua hệ thống bus liên tuyến.

Các danh mục khác nhau của giao thức Intersystem:
- Giao thức UART
- Giao thức USART
- Giao thức USB
2. Giao thức hệ thống nội bộ: Giao thức hệ thống Intra được sử dụng để giao tiếp hai thiết bị trong bảng mạch. Trong khi sử dụng các giao thức nội bộ hệ thống này, mà không sử dụng các giao thức nội hệ thống, chúng tôi sẽ mở rộng các thiết bị ngoại vi của vi điều khiển. Độ phức tạp của mạch và mức tiêu thụ điện năng sẽ tăng lên khi sử dụng giao thức nội hệ thống. Sử dụng giao thức nội bộ hệ thống phức tạp mạch và tiêu thụ điện năng, giảm chi phí và rất an toàn khi truy cập dữ liệu.

Các danh mục khác nhau của giao thức Intersystem
- Giao thức I2C
- Giao thức SPI
- Giao thức CAN
Giao thức UART:
UART là viết tắt của một máy phát và máy thu không đồng bộ phổ quát. Giao thức UART là một giao tiếp nối tiếp với hai giao thức có dây. Các đường tín hiệu cáp dữ liệu được dán nhãn là Rx và Tx. Giao tiếp nối tiếp thường được sử dụng để truyền và nhận tín hiệu. Nó được truyền và nhận dữ liệu nối tiếp từng bit mà không có xung lớp. UART lấy từng byte dữ liệu và gửi các bit riêng lẻ theo cách tuần tự. UART là một giao thức bán song công. Bán song công có nghĩa là truyền và nhận dữ liệu nhưng không đồng thời. Hầu hết các bộ điều khiển đều có UART phần cứng trên bo mạch. Nó sử dụng một đường dữ liệu duy nhất để truyền và nhận dữ liệu. Nó có một bit bắt đầu, dữ liệu 8 bit và bit một điểm có nghĩa là tín hiệu truyền dữ liệu 8 bit của một người từ cao xuống thấp.
Ví dụ: Email, SMS, Walkie-talkie.

Luồng dữ liệu giao thức UART
Giao thức USART:
USART là viết tắt của một máy phát và máy thu đồng bộ và không đồng bộ phổ quát. Nó là một giao tiếp nối tiếp của một giao thức hai dây. Các đường tín hiệu cáp dữ liệu được dán nhãn là Rx và TX. Giao thức này được sử dụng để truyền và nhận dữ liệu từng byte cùng với các xung đồng hồ. Nó là một giao thức song công có nghĩa là truyền và nhận dữ liệu đồng thời với các tốc độ bo mạch khác nhau. Các thiết bị khác nhau giao tiếp với vi điều khiển tới giao thức này.
Ví dụ: - Viễn thông.

Luồng dữ liệu giao thức USART
Giao thức USB:
USB là viết tắt của bus nối tiếp phổ quát. Một lần nữa nó là một giao tiếp nối tiếp của giao thức hai dây. Các đường tín hiệu cáp dữ liệu được dán nhãn D + và D-. Giao thức này được sử dụng để giao tiếp với các thiết bị ngoại vi của hệ thống. Giao thức USB được sử dụng để gửi và nhận dữ liệu nối tiếp đến máy chủ và các thiết bị ngoại vi. Giao tiếp USB yêu cầu phần mềm trình điều khiển dựa trên chức năng của hệ thống. Thiết bị USB có thể truyền dữ liệu trên xe buýt mà không có bất kỳ yêu cầu nào trên máy tính chủ. Hiện nay hầu hết các thiết bị đang sử dụng kỹ thuật này để giao tiếp với giao thức USB. Giống như máy tính để giao tiếp với bộ điều khiển ARM bằng USB. USB truyền dữ liệu các chế độ khác nhau. Đầu tiên là chế độ tốc độ chậm 10kbps đến 100 kbps, chế độ thứ hai là chế độ tốc độ đầy đủ 500kbps đến 10mbps, chế độ tốc độ cao 25mbps đến 400 Mbps. Chiều dài cáp tối đa của USB là 4 mét.
Ví dụ: Chuột, Bàn phím, Hub, công tắc, ổ bút.

Giao tiếp giao thức USB
Sự khác biệt giữa các giao thức giữa các hệ thống:

Giao thức I2C:
I2C là viết tắt của mạch tích hợp liên. I2C chỉ yêu cầu hai dây kết nối tất cả các thiết bị ngoại vi với vi điều khiển. I2C yêu cầu hai dây SDA (đường dữ liệu nối tiếp) và SCL (dây đồng hồ nối tiếp) để truyền thông tin giữa các thiết bị. Nó là một giao thức tổng thể cho một giao thức truyền thông nô lệ. Mỗi nô lệ có một địa chỉ duy nhất. Thiết bị chủ gửi địa chỉ của thiết bị phụ mục tiêu và đọc / ghi cờ. Địa chỉ phù hợp với bất kỳ thiết bị phụ nào mà thiết bị đó đang BẬT, các thiết bị phụ còn lại ở chế độ tắt. Khi địa chỉ phù hợp, sẽ tiến hành giao tiếp giữa chủ và thiết bị phụ đó và truyền và nhận dữ liệu. Máy phát gửi dữ liệu 8-bit, máy thu trả lời 1-bit báo nhận. Khi giao tiếp hoàn tất, master sẽ đưa ra điều kiện dừng. Bus I2C được phát triển bởi Philips Semiconductors. Mục đích ban đầu của nó là cung cấp một cách dễ dàng để kết nối CPU với chip thiết bị ngoại vi. Các thiết bị ngoại vi trong hệ thống nhúng thường được kết nối với bộ vi điều khiển như các thiết bị ánh xạ bộ nhớ. I2C chỉ yêu cầu hai dây để kết nối tất cả các thiết bị ngoại vi với vi điều khiển. Các dây hoạt động này, được gọi là SDA và SCL, đều là hai chiều. Dòng SDA là dòng dữ liệu nối tiếp và dòng SCA là dòng xung nhịp nối tiếp.

Luồng dữ liệu giao thức I2C
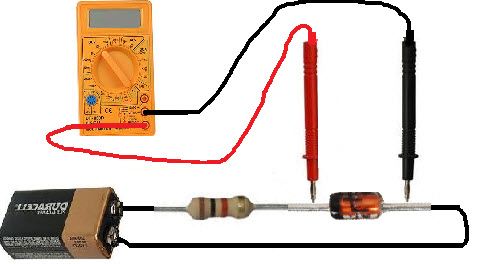
Điện trở kéo lên I2C:
Tại sao lại đưa ra các điện trở kéo lên trong dòng I2C SCL và SDA.
- Cả hai dòng SDA và SCL đều là các trình điều khiển mở.
- Nó có thể điều khiển đầu ra canot thấp trình điều khiển nó cao.
- Để đường dây có thể lên cao bạn phải cung cấp điện trở kéo lên
Giao thức SPI:
SPI là viết tắt của giao diện ngoại vi nối tiếp. Nó là một trong những giao thức truyền thông nối tiếp được phát triển bởi Motorola. Đôi khi giao thức SPI còn được gọi là giao thức 4 dây. Nó yêu cầu bốn dây giao thức MOSI, MISO, SS và SCLK.SPI được sử dụng để giao tiếp giữa thiết bị chủ và thiết bị phụ. Đầu tiên cái chính cấu hình đồng hồ bằng tần số. Sau đó, chủ sẽ chọn thiết bị phụ cụ thể để giao tiếp bằng cách kéo nút chọn chip. Thiết bị cụ thể đó được chọn và bắt đầu giao tiếp giữa chủ và phụ cụ thể đó. Chủ chỉ chọn một nô lệ tại một thời điểm. Nó là một giao thức truyền thông song công. Không giới hạn từ 8 bit trong trường hợp chuyển bit.

Luồng dữ liệu giao thức SPI
Giao thức CAN:
CAN là viết tắt của mạng vùng điều khiển. Nó là một giao thức truyền thông nối tiếp. Nó yêu cầu hai dây CAN cao (H +) và CAN thấp (H-). Nó được phát triển bởi công ty Robert bosh vào năm 1985 cho các mạng trong xe. Nó dựa trên một giao thức truyền tải hướng thông điệp.
Sự khác biệt giữa các giao thức giữa các hệ thống:
 Tín dụng Ảnh:
Tín dụng Ảnh:
- Luồng dữ liệu giao thức UART theo QNX
- Luồng dữ liệu giao thức USART của kỹ thuật máy tính
- Giao tiếp giao thức USB bằng g-ecx.images-amazon
- Luồng dữ liệu giao thức I2C bằng ni
- Luồng dữ liệu giao thức SPI bằng byteparadigm




{kind=link}
{kind=link}
{kind=link}
{kind=link}