Trong bài đăng này, chúng ta tìm hiểu mạch hẹn giờ thuận nghịch để vận hành cơ chế động cơ máy ấp trứng với bộ chuyển động ưu tiên. Ý tưởng do ông Anwar yêu cầu
Thông số kỹ thuật
Tôi đến từ Indonesia ..... Tôi cần sơ đồ cho bộ hẹn giờ ấp trứng với động cơ mô-men xoắn cao (Cửa sổ công suất động cơ DC trên ô tô). Tôi đang cố gắng để động cơ DC chạy theo hai chiều cho đến khi nó đạt đến vị trí cuối thì dừng lại và chuyển đổi cực tính để nó sẽ chạy theo hướng khác khi nguồn được cấp lại. Sau đó, làm điều tương tự ở đầu bên kia.
1. hẹn giờ bật nguồn trong 1 phút. (7:00 am-7: 01am)
2. động cơ chạy theo một hướng cho đến khi nó chạm vị trí dừng, chẳng hạn 30 giây.
3. nguồn điện cho động cơ tắt khi nó chạm vào vị trí dừng và chậm lại trong 1 phút. hẹn giờ kết thúc / tắt nguồn chính. cũng đảo cực sao cho.
4. lần tới khi đồng hồ chính bật (10: 00-10: 01), nó sẽ làm điều tương tự theo hướng ngược lại và lặp lại liên tục
5. Đảo chiều động cơ 12 VDC (Chỉ cần hai cáp từ động cơ + và -)
6. Cần chỉ báo Led cho động cơ Rev / Fwd
Bạn có thể giúp tôi không?
Cảm ơn bạn trước cho bất kỳ sự giúp đỡ.
Đây là một dự án nhà quan trọng cần được tin cậy 100%.
Thiết kế

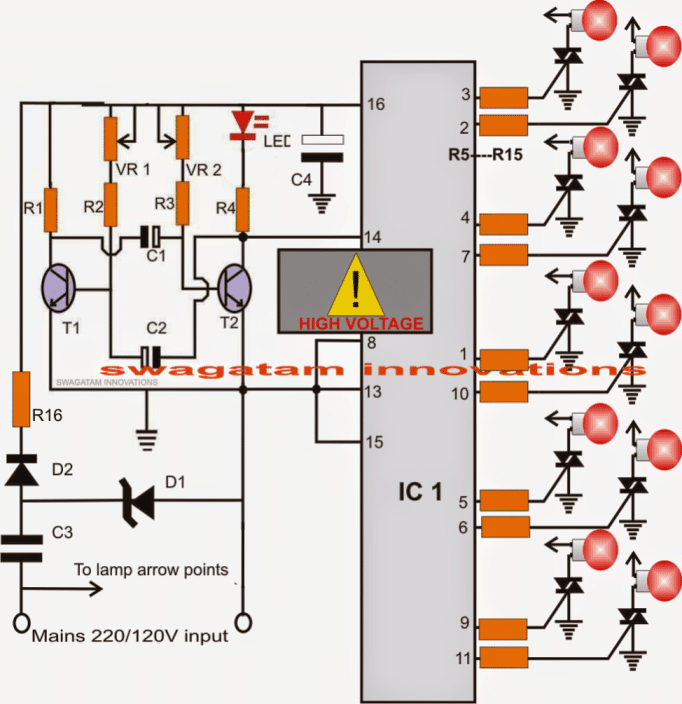
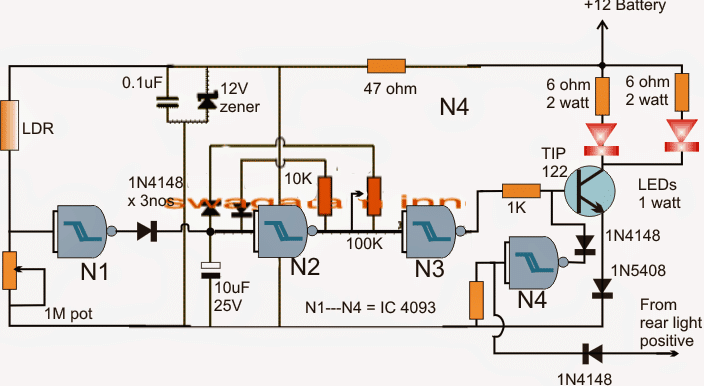
Trong hình trên, chúng ta có thể hình dung một thiết kế để thực hiện chuyển động tịnh tiến ngược được đề xuất của động cơ máy ấp trứng sau một khoảng thời gian xác định trước.
Ngay lập tức khi nguồn được BẬT, chúng ta có tình huống sau:
Công tắc từ tính cho 'bộ' có thể được coi là ở trạng thái ngừng hoạt động hoặc bị ngắt trong khi động cơ hoặc cơ cấu lồng ấp được thiết kế ở vị trí khởi động bằng không.
Xin lưu ý rằng tốt nhất là các công tắc 'đặt' / 'đặt lại' nên được thực hiện bằng công tắc sậy từ tính.
Khi nguồn được bật ON, IC 4060 được đặt lại thông qua C2 để nó bắt đầu quá trình đếm từ 0 và chân 3 được trả về logic 0.
Logic 0 ban đầu này được đưa qua C3 đến cơ sở của T1, ngay lập tức dẫn đến việc buộc T3 và rơ le liên kết của nó kích hoạt. R7 trong quá trình này đảm bảo T1 / T3 được chốt ở chế độ này.
Rơ le DPDT tại thời điểm này hoạt động tại các tiếp điểm N / O của nó, khởi động động cơ và cơ chế hướng tới chuyển động 'tiến tới' giả định.
Ngay khi động cơ bắt đầu chuyển động, nút 'set' được nhả ra để T4 và SPDT phía trên có cơ hội hoạt động, trong đó rơ le SPDT đạt được chuyển đổi vị trí N / O hiển thị các tiếp điểm N / C của DPDT ở chế độ chờ cung cấp..
Động cơ và / hoặc cơ cấu tiếp tục chuyển động cho đến khi đạt được vị trí 'đặt lại', điều này khiến T2 kích hoạt và phá vỡ chốt T1 / T4.
Với T4 được chuyển sang TẮT, rơle DPDT thay đổi vị trí của nó từ N / O sang N / C và cung cấp chuyển động ngược lại (ngược lại) cho cơ cấu động cơ.
Cơ chế động cơ máy ấp trứng bây giờ lật hướng của nó và bắt đầu chuyển động ngược lại cho đến khi nó đạt đến điểm 'đặt', nhanh chóng TẮT ổ đĩa cơ sở của T4, SPDT sẽ TẮT nguồn cắt của DPDT và toàn bộ cơ cấu đứng yên. .
Trong khi đó, IC 4060 tiếp tục đếm cho đến khi nó vẫn tạo ra mức logic 0 một lần nữa sau khi đi qua mức logic cao tại chân 3 của nó (bằng cách phóng điện C3).
Chu kỳ một lần nữa được bắt đầu và lặp lại quy trình như đã giải thích ở trên.
Trước: Nhấp nháy đèn LED với Arduino - Hướng dẫn hoàn chỉnh Tiếp theo: Đã khám phá bộ chống sét lan truyền công nghiệp công suất cao